If you are interested in products and services related to the research phase in this field, please contact for further inquiries.
Stroke, a leading cause of long-term disability, often results in significant impairment of upper limb motor functions. Traditional rehabilitation methods, while effective to some extent, face limitations in terms of consistency, intensity, and personalization. The advent of robotic rehabilitation technologies has introduced a new dimension to stroke recovery, promising more efficient and tailored rehabilitation programs. Among these innovations, exoskeleton robots have emerged as a powerful tool, offering enhanced precision, adaptability, and patient engagement.
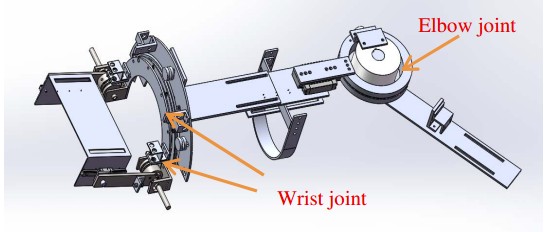 Fig.1 The structure of the device. (Gao B., et al., 2017)
Fig.1 The structure of the device. (Gao B., et al., 2017)
Historical Context and Evolution of Upper Limb Rehabilitation Robots
The development of upper limb rehabilitation robots has a rich history marked by significant milestones. Early systems like MIT-MANUS and the POMDP system laid the groundwork for robotic therapy, focusing on specific patient needs and two-dimensional movement. Subsequent advancements, such as the SAIL platform and RUPERT, introduced more complex and interactive training environments, combining mechanical support with functional electrical stimulation and virtual reality. These innovations have progressively improved the scope and effectiveness of rehabilitation, paving the way for more sophisticated and portable devices.
Addressing Limitations of Existing Rehabilitation Devices
Despite these advancements, traditional rehabilitation robots often fall short in critical areas. Many existing devices are cumbersome, with limited degrees of freedom and insufficient flexibility, making them impractical for widespread use. The heavy weight and complex structures of these robots can impose additional burdens on patients, hindering their mobility and comfort. Moreover, the lack of adaptability to different patient sizes and the absence of comprehensive safety features limit their applicability in diverse clinical settings. These challenges highlight the need for a new generation of rehabilitation robots that are lightweight, flexible, and highly accurate.
Design and Innovation of the New 3-DOF Exoskeleton Robot
- Design Requirements and Objectives
The development of the new three-degree-of-freedom (3-DOF) upper limb rehabilitation exoskeleton robot was guided by the need to address the limitations of existing devices. The primary design requirements included flexibility, lightweight construction, high accuracy, sufficient power for combined movements, and alignment with human physiological structures. These objectives aimed to create a device that is not only effective in rehabilitation but also comfortable and easy to use for patients.
- Mechanical Design and Components
The new exoskeleton robot is designed as a portable and flexible training device, consisting of three main parts: elbow flexion and extension, wrist rotation, and wrist flexion and extension. Each part corresponds to a degree of freedom, working together to complete the training and movement detection process.
Elbow Flexion and Extension
The elbow joint component is designed to mimic the natural movement of the human elbow, which has one degree of freedom—flexion and extension. The device includes a fixation part, a connecting plate, and a rotating shaft. The fixation plates, attached to the upper arm and forearm, secure the device to the patient's limb. The square groove in the fixation plates allows for easy bandaging. The rotating shaft, driven by the transmission part, moves the forearm when torque is applied. The inclusion of a slide rail and adjustable connecting rod ensures that the device can fit a wide range of patients. A rotary encoder is embedded in the middle of the joint to detect the device's position in real-time, providing reliable safety guarantees.
Wrist Rotation
The wrist rotation component is divided into a fixation part and a rotating part. Unlike the elbow joint, this part includes a caging mechanism that limits the rotation range to -10° to 80°, compared to the human wrist's range of -90° to 90°. The rotating part is constrained by four pairs of ball bearings and is fixed to the palm portion of the human body. The torque is transmitted through the transmission system, driving the rotation of the palm. The caging mechanism ensures that the movement is restricted to a safe and specific angle, enhancing the stability and safety of the training.
Wrist Flexion and Extension
The wrist flexion and extension component is composed of a rotating part, a fixation part, and a caging part. Similar to the wrist rotation mechanism, this part includes a finite position device that limits the rotation angle by altering the shape of the fixation position. The design ensures that the rotation shaft aligns with the wrist joint's axis, driving the wrist movement through the force applied to the rotating shaft. The device employs flexible transmission, with a hose sleeve and wire rope extending the action point of the force, reducing the burden on the patient. However, this flexible transmission can introduce accuracy errors, necessitating experimental verification.
System Evaluation and Accuracy Testing
Experimental Setup and Data Collection

Given the use of flexible transmission, the actual accuracy of the robot's operation needed to be verified through experiments. The experiment aimed to analyze the data from the motor and rotary encoder, calculate the differences, and evaluate the device's accuracy rate. The primary source of error in the flexible transmission is the wire rope's tension and looseness during movement.
The experimental setup involved analyzing the relationship between the motor's and rotary encoder's positions. The motor, with a high accuracy of 2000 pulses per second, and the rotary encoder were connected to a PMAC controller. The experimenter wore the device, and the elbow joint's movement was tested ten times. The motor rotated at a constant speed of 3 rad/s, driving the elbow joint's movement. The upper arm was kept perpendicular to the ground, and the forearm moved under the device's force.
Data Analysis and Error Calculation
The data collected from the motor and rotary encoder were analyzed to calculate the palstance (angular velocity) values. The palstance value was calculated using the following formula:
ωi = (θi+1 − θi) / Δt
where ωi is the palstance at a given moment, θi+1 and θi are the angles at consecutive moments, and Δt is the time interval between these angles.
The analysis revealed that the motor's palstance gradually smoothed to a value less than 3 rad/s, attributed to the device's resistance. The rotary encoder showed a lag of approximately 180 ms, during which the wire rope transitioned from loose to tight. After this initial delay, the rotary encoder rotated synchronously with the elbow device, maintaining the same palstance as the motor.
The deviation between the motor's and rotary encoder's palstance was calculated and plotted. The error rate was then determined using the following formula:
γi = (ωi − ϕi) / ϕi ×100%
where γi is the error rate at each moment, ωi is the palstance measured by the motor, and ϕi is the palstance measured by the rotary encoder.
Results and Conclusions
The experimental results showed that the error rate varied over time, with an average final error rate of 8.3%. This indicates an accuracy rate of 91.7%, which is an improvement over existing devices with an average error rate of 9.5%. The primary source of error was identified as the wire rope's tension and looseness during movement. Despite the challenges posed by flexible transmission, the new exoskeleton robot demonstrated acceptable accuracy and significant improvements over previous designs.
Future Prospects and Potential Enhancements
The development of the new three-DOF upper limb rehabilitation exoskeleton robot represents a significant step forward in the field of stroke rehabilitation. By addressing the limitations of existing devices, such as heavy weight, insufficient accuracy, and lack of portability, this new robot offers a more flexible, lightweight, and accurate solution for upper limb rehabilitation. The experimental evaluation confirms its high accuracy rate, making it a promising tool for improving the rehabilitation outcomes of stroke survivors.
Future research may focus on further refining the design to enhance accuracy and reduce the error rate. Additionally, integrating advanced sensor technologies and developing more sophisticated control algorithms could further improve the robot's performance and adaptability to individual patient needs. As technology continues to advance, the potential for robotic rehabilitation systems to revolutionize post-stroke care and improve patient outcomes remains a promising and exciting frontier in medical engineering.
If you have related needs, please feel free to contact us for more information or product support.
Reference
- Gao, Baofeng, et al. "Design and evaluation of a 3-degree-of-freedom upper limb rehabilitation exoskeleton robot." 2017 IEEE International Conference on Mechatronics and Automation (ICMA). IEEE, 2017.
This article is for research use only. Do not use in any diagnostic or therapeutic application.
Arm Fixation Series
