If you are interested in products and services related to the research phase in this field, please contact for further inquiries.
Soft wearable robotics represents a transformative leap in rehabilitation technology, offering a more comfortable, effective, and accessible solution for patients recovering from various physical impairments. This article explores the innovative design, fabrication, and experimental validation of a lightweight, soft wearable sleeve specifically designed to assist in the rehabilitation of forearm pronation and supination. By leveraging bio-inspired design principles and advanced fabrication techniques, this device stands at the forefront of a new era in medical rehabilitation.
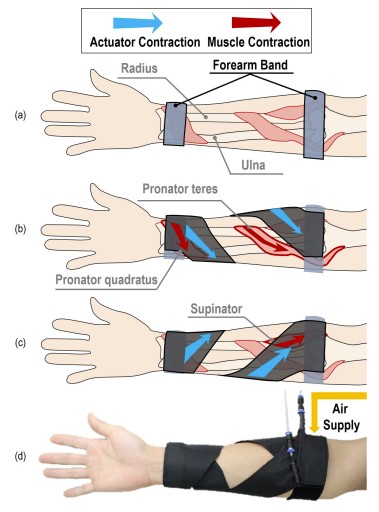 Fig.1 Design and mechanism of the proposed wearable device showing (a) the arm bands for easy anchoring of the actuators, the muscles and the actuators for (b) pronation and (c) supination, and (d) an actual prototype on human arm. (Park Se-H., et al., 2019)
Fig.1 Design and mechanism of the proposed wearable device showing (a) the arm bands for easy anchoring of the actuators, the muscles and the actuators for (b) pronation and (c) supination, and (d) an actual prototype on human arm. (Park Se-H., et al., 2019)
The Evolution of Rehabilitation Devices

Traditional rehabilitation devices have long been the mainstay in treating physical impairments resulting from conditions such as stroke, spinal cord injuries, and traumatic brain injuries. These devices, often made from rigid materials, are effective but come with significant drawbacks. They are typically bulky, heavy, and expensive, which limits their practicality for home use. Patients often find it challenging to engage in consistent rehabilitation due to the inconvenience of these devices. The advent of soft wearable robotics addresses these limitations by introducing lightweight, flexible, and affordable alternatives that can be easily integrated into daily life.
Bio-Inspired Design: Mimicking Human Muscles

The design of the soft wearable sleeve is inspired by the human musculoskeletal system, specifically targeting the pronator teres and supinator muscles responsible for forearm rotation. These muscles facilitate the essential movements of pronation (turning the palm downward) and supination (turning the palm upward). The device incorporates two actuators that function antagonistically, much like the natural muscle pairs in the forearm. When inflated, these actuators contract, providing the necessary force to assist in these rotational movements.
The actuators are made from heat-sealable fabric, chosen for its durability and ability to conform to the body's contours. This material choice ensures that the device remains comfortable and wearable for extended periods. The actuators are wrapped around the forearm and anchored securely using adjustable forearm bands. This design allows for a wide range of motion, closely mimicking the natural mechanics of the forearm.
Flat Pneumatic Actuators: A Key Innovation

Central to the device's functionality are the flat pneumatic actuators. Unlike traditional actuators with rigid structures, these actuators are slim and flexible, making them ideal for wearable applications. When inflated, they contract axially and expand radially, replicating the behavior of biological muscles. This design not only enhances comfort but also ensures that the device can provide effective assistance without causing discomfort or impeding movement.
The actuators are fabricated using a custom-built motorized heat sealing system, which allows for the creation of complex patterns with high precision. This system ensures that the actuators are robust and consistent, critical factors for reliable performance in rehabilitation settings. The use of a spherical rollerball tip on the heat applicator facilitates smooth movement and minimizes drag, further enhancing the fabrication process.
Characterization and Experimental Validation
To validate the device's performance, a series of experiments were conducted to characterize its mechanical properties and control capabilities. The first set of experiments focused on the force-length relationship of the actuators. The results showed that the contraction force decreased as the length of the actuator shortened, a behavior consistent with pneumatic actuators. This relationship is crucial for understanding how the device will perform under various conditions and for optimizing its design for maximum effectiveness.
The second set of experiments measured the torque generated by the device and its relationship with the rotation angle. A torque sensor and encoder were used to measure the torque as the arm was rotated through different angles. The results indicated that the torque approached zero as the rotation angle reached 180 degrees, supporting the design assumption that the actuators function as pivot points. This finding confirms that the device can provide smooth and controlled rotation, essential for effective rehabilitation.
Position Control with Vision Feedback
The device's ability to assist patients in achieving desired forearm positions was also tested using a vision feedback system. RGB and infrared cameras were used to track the angle of the forearm in real-time. The system was able to follow the desired angle with a root-mean-square error (RMSE) of about 7.83 degrees between 40 and 140 degrees. This result demonstrates the device's potential to assist patients in performing rehabilitation exercises independently, even when they cannot reach the desired positions on their own.
Future Directions and Improvements
While the current design shows significant promise, there are areas for future improvement. One challenge is the potential for slippage when high air pressure is applied. Future iterations may incorporate clothing techniques, such as wrist guards and elbow supports, to enhance stability and comfort. Additionally, the current device focuses solely on pronation and supination. Future work may integrate other types of upper limb rehabilitation devices to provide a more comprehensive solution.
Conclusion
The development of lightweight, soft wearable robotics marks a significant advancement in the field of rehabilitation technology. By mimicking the natural movements of the human forearm and leveraging advanced fabrication techniques, this device offers a comfortable, safe, and cost-effective alternative to traditional rehabilitation equipment. As research continues and technology advances, we can expect to see even more innovative solutions that enhance the quality of life for individuals recovering from physical impairments.
If you have related needs, please feel free to contact us for more information or product support.
Reference
- Park, Se-Hun, et al. "A lightweight, soft wearable sleeve for rehabilitation of forearm pronation and supination." 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2019.
This article is for research use only. Do not use in any diagnostic or therapeutic application.
Arm Fixation Series
